







序論:フィジカルAIにおけるパラダイムシフトとビデオ生成モデルの役割
2026年、フィジカルAIの世界は、大規模言語モデルがテキストの世界で果たしたのと同様の、劇的な転換点を迎えている。かつてのロボット開発は、人間が手作業でプログラムを記述するか、あるいは高コストなテレオペレーションを通じて一つ一つの動作を模倣させるという、極めてスケーラビリティに欠ける手法に依存していた。しかし、1X Technologies(以下、1X)とNVIDIAの戦略的提携は、このボトルネックを「ビデオ生成ベースのワールドモデル(World Model)」という革新的なアプローチで打破しようとしている 。
この新時代の核となるのは、ロボットが「未来を視覚的に想像し、その想像を物理的な行動に変換する」という能力である。1Xが開発した「1X World Model (1XWM)」は、インターネット規模の膨大なビデオデータから世界の物理法則を学習し、それをヒューマノイド・ロボット「NEO」の身体性と結びつけることで、未知の環境やタスクに対する驚異的な汎用性を実現した 。このプロセスは、従来のロボット学習を根底から覆すものであり、データ収集のコストを劇的に下げると同時に、自律的な自己改善のループ、すなわち「データ・フライホイール」を始動させるものである 。
本報告書では、1XWMのアーキテクチャ、逆動力学モデル(IDM)の統合、NVIDIAのProject GR00TやCosmosプラットフォームとの連携、そしてこれらの要素が統合されることで構築される、他社の追随を許さない競争優位性と戦略的な「堀(Moat)」について、技術的および市場的な視点から詳細に解明する。
第1章:1X World Model (1XWM) のアーキテクチャと技術的基盤
1XWMは、140億パラメータ(14B)を擁する生成型ビデオモデルをバックボーンとし、ロボットの現在の観測(画像フレーム)とテキストによる指示を受け取り、数秒先の視覚的な未来を予測する 。このモデルは、単なる映像の連続を生成するのではなく、物体間の接触、摩擦、重力、そしてロボット自身の行動が環境に与える影響を内包した「物理的に接地された予測」を行う。
1.1 ビデオ生成をプランナーとして活用する新パラダイム
従来のVision-Language-Action (VLA) モデルは、画像とテキストから直接アクション(行動)を予測するが、これは複雑な物理的相互作用を捉えきれないことが多い。対照的に、1XWMはビデオ生成を「視覚的プランナー」として利用する。まず、モデルが「成功したタスク」の映像を頭の中で生成し、その後、その映像を実現するための具体的な関節制御を決定する 。
これは、インターネット上に存在する何十億時間ものビデオデータを学習ソースとして利用したことによって可能になっている。人間が物体を操作する映像には、現実世界のダイナミクスに関する暗黙の知識が含まれており、1XWMはこれを吸収することで、直接的なロボット訓練データがないタスクでも「何が起こるべきか」を理解する 。
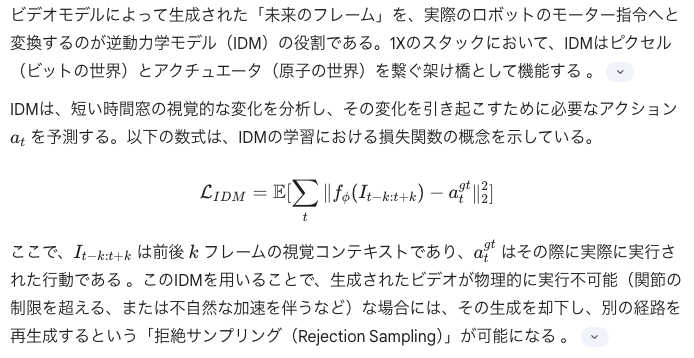
1.2 逆動力学モデル (Inverse Dynamics Model: IDM) の統合
1.3 多段階トレーニング戦略
1XWMは、汎用的な知能と特定の身体性を両立させるために、洗練された多段階の学習プロセスを採用している。
| 学習段階 | データソース | 学習の目的 |
| 第1段階:事前学習 | インターネット規模の一般ビデオ | 世界の物理、物体の恒常性、一般的な因果関係の習得 |
| 第2段階:ミッドトレーニング | 900時間の一人称視点(Egocentric)人間ビデオ | 人間の手による操作、道具の使用、第一人称視点での視覚的変化の理解 |
| 第3段階:身体性ファインチューニング | 70時間のNEO実機データ | ロボットの外観、カメラ特性、特定のキネマティクスへの適合 |
| 第4段階:タスク固有の調整 | 特定タスク(例:キッチンでの清掃)のログ | 複雑な物体(例:エアフライヤーのトレイ)の固有のダイナミクスの学習 |
このアプローチにより、わずか70時間の実機データで、数千時間のテレオペレーションを必要とする従来のモデルと同等、あるいはそれ以上の汎用性を獲得することに成功している 。
第2章:NVIDIAとの提携によるエコシステム的優位性
1X Technologiesの成功は、NVIDIAとの緊密な提携なしには語れない。NVIDIAは単なる計算リソースの提供者ではなく、フィジカルAIを構築するための完全なソフトウェアおよびハードウェアスタックを1Xと共同で開発・検証するパートナーである 。
2.1 NVIDIA Cosmos:世界基盤モデルの加速器
NVIDIAが発表した「Cosmos」は、世界基盤モデル(WFM)の開発を民主化し、加速させるための統合プラットフォームである。1Xはこのプラットフォームの主要なユーザーであり、Cosmosの各コンポーネントを自社の開発パイプラインに深く統合している 。
- Cosmos Predict: 30秒先の未来を予測可能な、世界最先端の予測モデルである。1Xはこのモデルをベースに、NEO固有の環境やタスクに合わせたカスタマイズを行っている 。
- Cosmos Tokenizer: ビデオデータをトークン化するための極めて効率的なツールである。空間的に最大16×16、時間的に最大8xの圧縮を実現しつつ、高い再構成品質を維持する。これにより、1XWMの学習と推論の計算コストが大幅に削減されている 。
- Cosmos Transfer: シミュレーション環境(Isaac Simなど)で生成された物理的に正確な映像を、実写に近いフォトリアルな映像へと変換する。これにより、現実世界では遭遇が困難な「エッジケース」のデータを、高品質なビデオとして生成し、学習に利用できる 。
2.2 Project GR00T と Jetson Thor:ヒューマノイドの「脳」と「神経」
NVIDIAの「Project GR00T」は、ヒューマノイド・ロボットのための汎用基盤モデルであり、1XのNEOはこのモデルの恩恵を直接受けている。GR00Tは、マルチモーダルな入力を理解し、複雑な動作を生成するための共通言語を提供する 。
このモデルをリアルタイムで動作させるためのハードウェアが、次世代ロボティック・コンピューティング・プラットフォーム「NVIDIA Jetson Thor」である 。NEOはこのチップをオンボードで搭載しており、クラウドに依存することなく、リアルタイムでの視覚推論、物理予測、およびアクションの実行を行う。Jetson Thorは、ヒューマノイドが必要とする膨大な計算量(トランスフォーマーモデルの推論、センサーフュージョン、低遅延制御など)を、極めて低い消費電力で処理するように最適化されている 。
2.3 Physical AI Data Factory Blueprint の活用
NVIDIAが提供する「Physical AI Data Factory Blueprint」は、データの生成、アノテーション、評価を自動化する統合的なパイプラインである 。
| コンポーネント | 役割と1Xへの影響 |
| Cosmos Curator | センサーデータの高速フィルタリングとアノテーション。大規模な実機・シミュレーションデータの品質管理を自動化する 。 |
| Cosmos Transfer | データの多様性を指数関数的に拡大。異なる照明条件、環境、オブジェクトのバリエーションを生成し、モデルの頑健性を高める 。 |
| Cosmos Evaluator | 生成されたビデオやロボットの行動を自動的に評価。人間の介入なしに、どのポリシー(制御方針)が優れているかを判断する 。 |
この「データ工場」により、1Xは物理的なロボットフリートを無限に増やすことなく、計算資源を投入するだけで「経験」を積み上げることができる。NVIDIAのRev Lebaredianが提唱する「Compute is Data(計算はデータである)」という哲学は、この仕組みによって具現化されている 。
第3章:自律的なデータ・フライホイールと戦略的Moat
1X Technologiesの最大の戦略的優位性は、一度始動すると他社の追随を許さない速度で自己強化される「データ・フライホイール」の構築に成功したことにある。このフライホイールは、ハードウェアの特性、アルゴリズムの革新、そして計算インフラの三位一体によって支えられている。
3.1 「軟質ロボティクス」がもたらす高密度なデータ収集
1XのNEOは、金属の骨組みを露出させた従来のヒューマノイドとは異なり、筋肉のような繊維と軟質な外装で覆われた「ソフトボディ」を採用している 。この設計は、単なる安全性のための配慮ではなく、データ収集において決定的な役割を果たしている。
- 安全な失敗の許容: 従来の硬いロボットは、家庭内などの非構造化環境で失敗(転倒や衝突)すると、家具や人間、あるいは自身に致命的なダメージを与える。一方、NEOは柔軟な身体により、これらの衝撃を吸収できる。これにより、監視なしでの自律的な「探索」が可能になり、失敗データを含む膨大な学習サンプルを収集できる 。
- 物理的順応性による Sim-to-Real の解消: ソフトボディは、物理的な接触時の微細な摩擦や衝撃を自然に吸収するため、シミュレーション(Isaac Sim)と現実の物理挙動の誤差(ギャップ)が極めて小さくなる 。1Xは「ハードウェアをAIスタックの第一級市民」と位置づけており、身体そのものがAIの学習を助けるように設計されている 。
3.2 自己教示(Self-Teaching)サイクル
1XWMの導入により、NEOは「自分自身で教える」能力を獲得した。初期の学習は人間の一人称ビデオやわずかなデモンストレーションから始まるが、一度モデルが「ゼロではない成功率」を達成すると、そこから自律的な改善が始まる 。
- 探索(Exploration): ロボットが未知のタスクに挑戦する。
- 評価(Evaluation): ワールドモデル(1XWM)自体が、その行動が成功したか、あるいは物理的に正しかったかを、将来予測映像との照合によって自己評価する 。
- 強化(Reinforcement): 成功したパターンはポリシーに定着し、失敗したパターンは「負の例」として学習データに組み込まれる。
このサイクルは、人間のオペレーターの手を借りることなく、ロボットが稼働している限り24時間365日続き、データの蓄積速度は人間の介在する他社のシステムを圧倒する 。
3.3 テストタイム計算(Test-Time Compute)とスケーリング
1XWMは、推論時にも計算資源を投入することで、その場で知能を向上させることができる。これは、一つのタスクに対して複数の未来を並列に「想像」し、その中から最も成功の可能性が高いものを選択して実行する手法である 。
例えば、「ティッシュを箱から引き抜く」という精密な動作において、一度の予測では成功率が30%であっても、8つの未来を生成し、その中からVLM(Vision-Language Model)が最適なものを評価・選択することで、実行時の成功率を45%以上に高めることが実証されている 。これは、大規模言語モデルにおける「Chain-of-Thought」や「Search」と同様の概念をフィジカルAIに持ち込んだものであり、ハードウェアの進化(BlackwellからRubinへ)がそのままロボットの「現場での賢さ」に直結する構造を作り上げている 。
第4章:ハードウェア・インフラストラクチャ:BlackwellからRubinへ
データ・フライホイールを高速で回転させるためには、膨大な計算パワーが必要である。1Xは、NVIDIAの最新GPUアーキテクチャを世界で最も早く、かつ深く活用できるポジションを確保している。
4.1 Blackwell HGX B200 による現在の学習
現在、1Xは NVIDIA Blackwell HGX B200 GPU クラスターを使用して、14Bパラメータの1XWMを訓練している 。Blackwellアーキテクチャは、第2世代のトランスフォーマー・エンジンを搭載しており、特にビデオ生成のような大規模なアテンション計算が必要なモデルにおいて、前世代を圧倒するパフォーマンスを発揮する 。
1Xはこの強力なインフラを利用して、ミッドトレーニングからポストトレーニングまでのイテレーション速度を「週単位から分単位」へと短縮することに成功した 。
4.2 2026年:Vera Rubin アーキテクチャへの移行とその衝撃
2026年に投入される NVIDIA の新アーキテクチャ「Rubin」は、フィジカルAIの地平をさらに押し広げる 。
| 特徴 | Blackwell (B200) | Vera Rubin (R100/NVL72) |
| 学習効率 | 基準 | 4倍少ないGPUで同一のMoEモデルを学習可能 |
| 推論コスト | 基準 | トークンあたりのコストを最大10分の1に削減 |
| メモリ帯域幅 | 高 (HBM3e) | 極限 (HBM4、最大22 TB/s) |
| ネットワーク | NVLink 5 | 第6世代 NVLink (3.6 TB/s GPU間帯域) |
| 専用CPU | Grace CPU | Vera CPU (エージェント推論に最適化) |
Rubinプラットフォームへの移行により、1Xは「テストタイム計算」をさらに大規模に行うことが可能になる。ロボットが何百もの可能性を数ミリ秒でシミュレーションし、最適解を選択するという、人間以上の予見能力を持つ自律エージェントへと進化するための土台がここで完成する 。
第5章:競合分析と市場における独占的ポジション
1X Technologiesのアプローチは、TeslaのOptimusやFigure AIといった競合他社と比較しても、独自の「堀」を築いている。
5.1 Tesla Optimus との比較
Teslaは自社の工場という広大な実験場と、膨大な実機フリートを持つが、その学習は依然として「実世界データ」への依存度が高い 。
- Teslaの戦略: 工場での反復作業(構造化環境)をターゲットとし、大量の人間によるデモンストレーションでモデルを磨く 。
- 1Xの戦略: 家庭や介護といった「極めて多様で予測不可能な環境(非構造化環境)」をターゲットとし、ビデオ生成モデルによって「見たことのない状況」への適応力をゼロショットで獲得する 。
1Xのアプローチは、高価な実機データを生成的な予測で補うため、多様な環境への「スケールアップ」のスピードにおいて、Teslaを上回る可能性がある 。
5.2 Figure AI との比較
Figure AIはOpenAIとの提携により、高度な「対話能力」と「推論能力」を武器にしている 。
- Figureの強み: 「お腹が空いた」という曖昧な要求に対し、冷蔵庫の中身を確認して提案するような、高次の意味理解に優れる 。
- 1Xの強み: 言語的な推論以上に、「物理的なダイナミクスの予測」に特化している。複雑な形状の布を畳む、壊れやすいものを扱うといった、物理的なニュアンスが重要なタスクにおいて、ビデオベースの1XWMは圧倒的な精度を発揮する 。
5.3 商用化の進展:NEO の市場投入
1Xは2026年にNEOの一般家庭への配送を開始する予定であり、その初期生産分は予約開始5日間で完売した 。2万ドルの購入モデルに加え、月額499ドルのサブスクリプションモデルを提供することで、ロボットを「資産」ではなく「サービス(RaaS)」として普及させる戦略を採っている 。
この商用デプロイが始まれば、各家庭からのリアルタイムなフィードバックがデータ・フライホイールに流れ込み、モデルの進化はさらに加速する。これは、TeslaがFSDで実現した「デプロイされたフリートからの学習」のロボット版と言える 。
第6章:結論と将来展望
1X TechnologiesとNVIDIAの提携による「ワールドモデル」ベースのフィジカルAIアーキテクチャは、単なる技術的な選択ではなく、長期的な市場独占を狙うための周到な戦略である。
6.1 戦略的Moatの総括
1Xが構築した「堀」は、以下の四つの層で構成されている。
- データ層: インターネットビデオをロボットのアクションへと変換する、14Bパラメータの1XWMとIDMのパイプライン。これは、人間によるデモンストレーションの限界を突破している 。
- ソフトウェア層: NVIDIA CosmosとGR00Tによる、合成データ生成と自己評価の自動化。これにより「計算が知能を生む」構造が完成している 。
- ハードウェア層: ソフトボディという物理的優位性と、Jetson ThorおよびRubin GPUによる圧倒的なオンボード計算能力の融合 。
- エコシステム層: Microsoft AzureやIFS、OpenAIといった強力なパートナーシップによる、家庭から工場までの広範なバーティカル統合 。
6.2 フィジカルAIの未来
「Compute is Data」という時代において、1X Technologiesは物理世界におけるGoogleやOpenAIのような存在を目指している。ビデオを通じて世界の理(ロゴス)を学び、それをロボットの肉体を通じて実行する。このプロセスが洗練されるにつれ、ロボットは特定のプログラムに従って動く機械から、私たちの生活空間のコンテキストを理解し、自律的に助けを提供する「真のパートナー」へと変貌を遂げるだろう 。
NVIDIAとの提携は、この進化に必要な「無限の燃料(計算資源)」と「最先端のエンジン(AIプラットフォーム)」を1Xに独占的に提供し続ける。他社が個別のロボット技術に注力する中、1Xは物理世界のデジタルツインとしてのワールドモデルを構築し、それを制御可能な行動へと変換する独自のアーキテクチャを確立した。これこそが、他者の追随を許さない競争優位性の正体である。
2026年以降、私たちはフィジカルAIが「自ら学び、自ら成長する」瞬間を、NEOという形で目の当たりにすることになるだろう。その背後にあるのは、ビットとアトムの境界を消し去る、ビデオ生成ベースのワールドモデルという究極の知能の形である 。
引用文献
- NVIDIA GTC Showcases Virtual Worlds Powering the … – NVIDIA Blog, 5月 3, 2026にアクセス、 https://blogs.nvidia.com/blog/gtc-2026-virtual-worlds-physical-ai/
- CES 2026 – Rise of Physical AI: From Keynote to Factory Floor, 5月 3, 2026にアクセス、 https://sve.io/p/ces-2026-rise-of-physical-ai-from
- 1X World Model | From Video to Action: A New Way Robots Learn, 5月 3, 2026にアクセス、 https://www.1x.tech/discover/world-model-self-learning
- 1X launches world model enabling NEO robot to learn tasks by watching videos, 5月 3, 2026にアクセス、 https://www.therobotreport.com/1x-launches-world-model-enabling-neo-robot-to-learn-tasks-by-watching-videos/
- 1X Unveils Updated World Model – Humanoid Robotics Technology, 5月 3, 2026にアクセス、 https://humanoidroboticstechnology.com/industry-news/1x-unveils-paradigm-shift-in-humanoid-ai-neos-starting-to-learn-on-its-own/
- 1X’s NEO Robot Learns from Videos, Not Tedious Training – RoboHorizon, 5月 3, 2026にアクセス、 https://robohorizon.uk/en-gb/magazine/2026/01/neo-robot-video-learning/
- 1X World Model: Evaluating Bits, not Atoms, 5月 3, 2026にアクセス、 https://www.1x.tech/1x-world-model.pdf
- 1X Achieves 5 Million Views by Truly Applying “World Model” to Robot NEO – 36氪, 5月 3, 2026にアクセス、 https://eu.36kr.com/en/p/3638621438414215
- How 1X Is Teaching Its Humanoid Robot to Learn on Its Own – eWeek, 5月 3, 2026にアクセス、 https://www.eweek.com/news/1x-neo-humanoid-robot-self-learning/
- 1X World Model, 5月 3, 2026にアクセス、 https://www.1x.tech/discover/redwood-ai-world-model
- Aligning Video World Models with Executable Robot Actions via Inverse Dynamics Rewards, 5月 3, 2026にアクセス、 https://arxiv.org/html/2603.17808v1
- NVIDIA and Global Robotics Leaders Take Physical AI to the Real World, 5月 3, 2026にアクセス、 https://nvidianews.nvidia.com/news/nvidia-and-global-robotics-leaders-take-physical-ai-to-the-real-world
- Inside 1X’s Humanoid Robot Stack: Simulation, AI Training, and Onboard Compute with NVIDIA, 5月 3, 2026にアクセス、 https://www.1x.tech/discover/nvidia-gtc-2026
- Physical AI with World Foundation Models | NVIDIA Cosmos, 5月 3, 2026にアクセス、 https://www.nvidia.com/en-us/ai/cosmos/
- nvidia/Cosmos-0.1-Tokenizer-DV4x8x8 – Hugging Face, 5月 3, 2026にアクセス、 https://huggingface.co/nvidia/Cosmos-0.1-Tokenizer-DV4x8x8
- Cosmos Tokenizer: A suite of image and video neural tokenizers – Research at NVIDIA, 5月 3, 2026にアクセス、 https://research.nvidia.com/labs/dir/cosmos-tokenizer/
- NVIDIA Announces Open Physical AI Data Factory Blueprint to Accelerate Robotics, Vision AI Agents and Autonomous Vehicle Development, 5月 3, 2026にアクセス、 https://nvidianews.nvidia.com/news/nvidia-announces-open-physical-ai-data-factory-blueprint-to-accelerate-robotics-vision-ai-agents-and-autonomous-vehicle-development
- Nvidia at CES 2026: Rubin platform, Vera CPU, GR00T robots, and Alpamayo L4 autonomy, 5月 3, 2026にアクセス、 https://techfundingnews.com/nvidia-at-ces-2026-rubin-platform-vera-cpu-gr00t-robots-and-alpamayo-l4-autonomy/
- NVIDIA Introduces Open Physical AI Data Factory for Robots and Autonomous Systems, 5月 3, 2026にアクセス、 https://www.rockingrobots.com/nvidia-introduces-open-physical-ai-data-factory-for-robots-and-autonomous-systems/
- Nvidia Intros Data Factory, Robotics Models in Physical AI Push – AI Business, 5月 3, 2026にアクセス、 https://aibusiness.com/robotics/nvidia-intros-data-factory-robotics-models-for-physical-ai
- 1X Opens US Factory, Targets 10,000 Humanoid Robots in First Year – eWeek, 5月 3, 2026にアクセス、 https://www.eweek.com/news/news-1x-california-factory-neo-humanoid-robot/
- Best Home Robots 2026: Tesla Optimus vs. Figure vs. 1X, 5月 3, 2026にアクセス、 https://aidevdayindia.org/blogs/ai-living-smart-homes-robots/best-humanoid-robots.html
- 1X World Model – YouTube, 5月 3, 2026にアクセス、 https://www.youtube.com/watch?v=xPX6dDRYbV4
- Rack-Scale Agentic AI Supercomputer | NVIDIA Vera Rubin NVL72, 5月 3, 2026にアクセス、 https://www.nvidia.com/en-us/data-center/vera-rubin-nvl72/
- Nvidia launches powerful new Rubin chip architecture | TechCrunch : r/hardware – Reddit, 5月 3, 2026にアクセス、 https://www.reddit.com/r/hardware/comments/1q53ow8/nvidia_launches_powerful_new_rubin_chip/
- NVIDIA Vera Rubin Opens Agentic AI Frontier, 5月 3, 2026にアクセス、 https://nvidianews.nvidia.com/news/nvidia-vera-rubin-platform
- NVIDIA Kicks Off the Next Generation of AI With Rubin — Six New Chips, One Incredible AI Supercomputer – NVIDIA Investor Relations, 5月 3, 2026にアクセス、 https://investor.nvidia.com/news/press-release-details/2026/NVIDIA-Kicks-Off-the-Next-Generation-of-AI-With-Rubin–Six-New-Chips-One-Incredible-AI-Supercomputer/default.aspx
- Inside the NVIDIA Vera Rubin Platform: Six New Chips, One AI Supercomputer, 5月 3, 2026にアクセス、 https://developer.nvidia.com/blog/inside-the-nvidia-rubin-platform-six-new-chips-one-ai-supercomputer/
- Infrastructure for Scalable AI Reasoning | NVIDIA Vera Rubin Platform, 5月 3, 2026にアクセス、 https://www.nvidia.com/en-us/data-center/technologies/rubin/
- Exploring NVIDIA Rubin: The future of AI supercomputing | genai-research – Wandb, 5月 3, 2026にアクセス、 https://wandb.ai/wandb_fc/genai-research/reports/Exploring-NVIDIA-Rubin-The-future-of-AI-supercomputing–VmlldzoxNTU0ODcyNw
- Figure 03 vs Tesla Optimus Comparison Tracker (2026) – New Market Pitch, 5月 3, 2026にアクセス、 https://newmarketpitch.com/blogs/news/humanoid-robotics-figure-vs-tesla
- eWeek ranks Tesla Optimus first in 2026 humanoid robot rankings, 5月 3, 2026にアクセス、 https://humanoid.guide/eweek-ranks-tesla-optimus-first-in-2026-humanoid-robot-rankings/
- The Top 10 Humanoid Robots, Ranked: Tesla, Unitree, and More – eWeek, 5月 3, 2026にアクセス、 https://www.eweek.com/news/humanoid-robot-power-rankings-list/
- NVIDIA News: GPUs, CUDA, AI & Data Center Updates, 5月 3, 2026にアクセス、 https://letsdatascience.com/news/topic/nvidia
- 1X Unveils Paradigm Shift In Humanoid AI: NEO’s Starting to Learn On Its Own – Investing News Network, 5月 3, 2026にアクセス、 https://investingnews.com/1x-unveils-paradigm-shift-in-humanoid-ai-neo-s-starting-to-learn-on-its-own/
- IFS and 1X Technologies Partner to Bring Industrial AI to the Physical World, 5月 3, 2026にアクセス、 https://www.ifs.com/en/insights/news/ifs-and-1x-technologies-partner-to-bring-industrial-ai-to-the-physical-world
- NVIDIA’s $100B bet on OpenAI – The Neuron, 5月 3, 2026にアクセス、 https://www.theneurondaily.com/p/nvidia-s-100b-bet-on-openai
- Artificial Intelligence | 1X, 5月 3, 2026にアクセス、 https://www.1x.tech/ai