





今朝あげた以下の投稿の技術解説を豊富に盛り込んだバージョンです。
日本企業が知らなさすぎる「フィジカルAI」。NVIDIAの物理シミュレーションがなければ旧時代の「電子工作」、米中欧には勝てません
産業界の特異点:フィジカルAIが定義する次世代の競争軸
現代の製造業は、ディスプレイの中に閉じられた従来の人工知能(AI)から、現実の物理世界を直接認識し、推論し、自律的に行動する「フィジカルAI」へと主戦場を移している。フィジカルAIとは、ロボットや車両、インフラなどの物理的な身体(Embodiment)にインテリジェントなアルゴリズムを統合し、実世界との相互作用をリアルタイムで学習・実行させる技術の総称である1。これまで日本の製造業が誇ってきた「自動化」は、厳密に定義された環境下で、人間が記述したコードに従って動作する静的なシステムであった。しかし、労働力の急速な減少と非定型作業への需要増大に直面する今日、従来の「プログラミング」に依存した手法は限界に達しており、それを補完・置換する「学習」に基づく知能、すなわちフィジカルAIの導入が企業の生存を左右する分水嶺となっている3。
この技術転換の本質は、ハードウェアの制御ロジックを「ルールベース(命令)」から「推論ベース(予測)」へと移行させる点にある。NVIDIA Omniverseを中心とした高精度な物理シミュレーション基盤が存在しない状況でのロボット開発は、物理法則を無視した場当たり的な調整に終始する、いわば旧時代の「電子工作」の延長線上に留まってしまう4。フィジカルAIは、大規模言語モデル(LLM)が次に続く単語を予測するように、物理空間における次の状態を予測し、最適な行動を生成する能力を持つ3。この「物理的な知能」を構築するためには、現実世界では不可能な数百万回、数千万回に及ぶ試行錯誤を仮想空間で実行し、そこから得られた知見を実世界に転移させる「Sim-to-Real」のプロセスが不可欠である7。
世界のフィジカルAI市場は、NVIDIA CEOのジェンセン・フアンが最初にフィジカルAIの概念をGTC2025の基調講演で紹介した時、「世界で50兆ドル規模(7500兆円)」と表現した。その後のNVIDIAの桁違いの成長を見れば、彼の「世界で50兆ドル規模」という表現は決して誇張ではないと推測できる。
また、関連するシステム市場全体では2030年までに約4,300億ユーロ(約70兆円)に達するとの推計もあり、その中心を担うのは自動車産業(1,710億ユーロ)や産業オートメーション、倉庫物流(690億ユーロ)といった、日本が歴史的に強みを持ってきた分野である3。日本企業がこの巨大な市場で主導権を維持するためには、ハードウェア単体での差別化から、シミュレーション・ファーストによる「ソフトウェア定義型(Software-Defined)」の開発モデルへの抜本的な転換が求められている4。
| 指標 | 2025年(予測値) | 2030年/2032年(予測値) | 成長率/規模 |
| グローバル・フィジカルAI市場規模 | 8.9億ドル | 152.8億ドル (2032) | CAGR 47.2% |
| フィジカルAIシステム市場全体 | – | 4,300億ユーロ (2030) | – |
| 自動車セクターの市場シェア | – | 1,710億ユーロ (2030) | セクター別最大 |
| 産業オートメーション・倉庫物流 | – | 690億ユーロ (2030) | 第二の主要市場 |
3
電子工作からの脱却:物理シミュレーションが「知能」に与える価値
従来のロボット開発において、動作の微調整や環境変化への対応は、技術者が現場で実機を動かしながらコードを修正する「現物合わせ」の作業であった。しかし、フィジカルAI時代においては、このアプローチは「電子工作」的な非効率性を露呈させる。NVIDIA Omniverseを基盤とする物理シミュレーションは、現実の光、影、質感、摩擦、剛性、そして時間の経過を数学的に正確に再現することで、この非効率性を打破する11。
物理的正確性とOpenUSDによるエコシステム
NVIDIA Omniverseが採用しているOpenUSD(Universal Scene Description)は、単なる3Dデータ形式ではなく、物理特性、センサーの挙動、材料の性質、さらにはロボットのキネマティクス(運動学)を包括的に記述するための共通言語として機能する11。これにより、異なるメーカーのロボット、センサー、コンベア、建物などのデジタル資産が、単一の仮想空間内で相互に干渉し、物理法則に従って相互作用することが可能になる。
日本の部品メーカーが自社の製品を「SimReady」なOpenUSDアセットとして提供することで、世界中のAI開発者は、物理的に正確な挙動を示す日本の高性能センサーやモーターを、仮想空間内で即座に自身のAIモデルの学習に組み込むことができる4。これは、日本のハードウェアがグローバルなフィジカルAIの「標準インフラ」として機能することを意味し、単なる部品供給を超えた戦略的地位の確立を可能にする4。
合成データ生成(SDG)による学習の飛躍的加速
AIの認識精度を向上させるためには、膨大な量のラベル付き学習データが必要となる。実世界でカメラ画像を撮影し、一点一点アノテーション(ラベル付け)を行う作業は、莫大なコストと時間を要するだけでなく、人間によるミスも避けられない。Omniverse内のReplicatorツールを活用した合成データ生成(SDG)は、照明条件、カメラの画角、対象物の配置、テクスチャをランダムに変更した(ドメイン・ランダマイゼーション)数百万枚の画像を、正確なラベルと共に自動的に生成する11。
この手法により、現実には滅多に発生しないが致命的な事故に繋がる「エッジケース」や、複雑な遮蔽条件、反射の激しい金属パーツの識別といった難易度の高い課題を、安全かつ安価に学習させることが可能になる11。フォルクスワーゲンやフォックスコンといった企業は、このSDGを活用することで、実データ収集のコストを劇的に削減しながら、認識精度の向上を実現している14。
投資対効果(ROI)の定量的分析:シミュレーション・ファーストの経済合理性
経営層がデジタルツインおよびフィジカルAIの導入を決定する上で、最も重要な判断基準はその経済的効果である。ABBやNVIDIA、そしてデロイトなどの調査によれば、シミュレーション・ファーストのアプローチは、コスト削減、開発期間の短縮、そして稼働後のダウンタイム低減の三側面において、極めて高いROIをもたらすことが実証されている17。
導入コストと市場投入期間(TTM)の改善
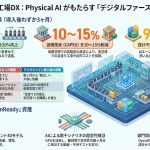
従来のロボット導入プロセスでは、現場でのティーチング、干渉チェック、タクトタイムの調整に多大な時間が費やされていた。ABBが開発した「RobotStudio HyperReality」は、Omniverseを統合することで99%のシミュレーション精度を達成しており、これによりロボットの立ち上げ・試運転時間を最大80%短縮することに成功している17。また、物理的なプロトタイプを作成する前に仮想空間での検証を完了させることで、展開コスト全体を最大40%削減し、製品の市場投入期間を50%短縮できることが示されている18。
| 項目 | 従来のプロセス | シミュレーション・ファースト | 改善効果(最大) |
| ロボット展開コスト | 100% | 60% | 40% 削減 |
| 立ち上げ・試運転時間 | 数週間〜数ヶ月 | 数日 | 80% 短縮 |
| 市場投入期間(TTM) | 100% | 50% | 50% 短縮 |
| シミュレーション精度 | 概算的・幾何学的 | 99% 物理的正確性 | 圧倒的な信頼性 |
| 実機へのコード転送 | 手動調整・書き直し | 書き直しなし(Seamless) | 開発効率の極大化 |
14
運用フェーズにおける経済効果とリスク回避
デジタルツインの価値は開発段階に留まらない。稼働後の工場において、リアルタイムのセンサーデータとデジタルツインを連携させることで、予測メンテナンスの精度が劇的に向上する。マッキンゼーのデータによれば、デジタルツインを基盤とした予測メンテナンスプログラムは、設備のダウンタイムを30〜50%削減し、メンテナンスコストを10〜40%削減する効果がある19。
さらに、物流倉庫などの複雑な環境において、新しい自動化設備やレイアウト変更を導入する際、事前検証なしでの投資は500万ドルから5,000万ドルの資産をリスクに晒すことになる19。一箇所のボトルネックが全体のタクトタイムを低下させるリスクを、仮想空間での数千時間のシミュレーションによって事前に排除できることは、経営における巨大な不確実性の解消を意味する19。
日本の製造業における構造的課題とフィジカルAIによる突破
日本の製造業は現在、労働力不足という「静かなる有事」に直面している。特に熟練工の高齢化と退職に伴う技術承継の断絶は、単なる効率化の問題を超えた産業基盤の崩壊を招きかねない。フィジカルAIは、この課題に対する技術的かつ構造的な解を提供する4。
技能のデジタル化と「産業の学習装置」の構築
日本の強みであった現場の「暗黙知」や、試作過程における「失敗の知」は、これまで熟練者の頭の中にのみ存在していた。しかし、これらの知見がデジタル化されないまま熟練者が引退すれば、その価値は消失する。フィジカルAIは、熟練工の動きをVRやセンサーを通じてキャプチャし、それを模倣学習(Imitation Learning)や強化学習のデータセットとして活用することで、技能を「再現可能な知能」へと変換する1。
このプロセスにおいて、日本の製造現場は単なる「生産の場」から、高品質な物理データを生成する「フィジカルAIの学習装置」へと再定義される5。安く大量に作ることの価値が低下する中で、いかに高度な作業をデータ化し、世界に冠たる「自律型モデル」として構築できるかが、日本企業の新たな競争優位性となる22。
2024年問題と自律化への必然性
物流・建設・製造の各分野で深刻化する「2024年問題」は、人間の労働力に依存したビジネスモデルの限界を突きつけている。フィジカルAIを搭載した自律型移動ロボット(AMR)や協働ロボット(コボット)は、従来のような「柵に囲まれた定型作業」ではなく、人間と同じ空間で安全に協力しながら、変動する作業内容に柔軟に対応できる1。
例えば、トヨタ自動車の熱処理工程(鍛造ライン)では、高温の金属を扱うという人間にとって危険な作業を、Isaac Simによる仮想空間での事前学習を経たロボットが担っている4。このように、極限環境や危険作業から人間を解放しつつ、24時間稼働が可能な「自律化」を実現することは、労働力不足という宿命的な課題を抱える日本にとって、唯一の持続可能な成長戦略である4。
技術的深掘:Sim-to-Realのギャップを埋める先端手法
フィジカルAIの成功は、シミュレーション内での学習成果がどれだけ正確に実世界に転送されるかにかかっている。NVIDIA Isaac SimおよびIsaac Labは、この「Sim-to-Realギャップ」を解消するための高度な技術スタックを提供している7。
強化学習と物理パラメータの自動チューニング
ロボットに複雑な操作を教える際、一つ一つの動きを命令するのではなく、最終的な目標(例:対象物を壊さずに掴む)に対する「報酬」を定義する深層強化学習(DRL)が用いられる7。

ロボットの触覚と固有受容感覚(Proprioception)
AIが物理世界を真に理解するためには、視覚だけでなく触覚が必要である。最新のフィジカルAIトレンドでは、高密度の圧力センサーを備えた「ロボットの皮膚」や、関節にかかるトルクを統合した固有受容感覚のシミュレーションが重視されている1。Isaac Simは、これらの微細なセンサーデータをエミュレートし、AIが「柔らかい桃」と「硬い石」を識別し、適切な力で保持するための学習環境を提供する1。
ハードウェアとソフトウェアの協調設計(Co-Evolution)のロードマップ
フィジカルAIの進化は、ソフトウェアの進歩だけでなく、それを実行するハードウェアの進化と表裏一体である。今後10年のロードマップにおいて、ハードウェアとAIアルゴリズムを同時に最適化する「Co-Design(協調設計)」が不可欠な潮流となる25。
ソフトウェア定義型ハードウェアの台頭
従来のハードウェア開発は、物理的な設計が完了した後にソフトウェアを開発する線形的なプロセスであった。しかし、NVIDIA OmniverseとOnshapeのようなクラウドネイティブCADの連携により、設計変更が即座にシミュレーション環境に反映される並列開発が可能になった27。これにより、AIの学習効率を最大化するようにロボットの腕の長さやモーターの配置を最適化するといった、ソフトウェア主導のハードウェア設計が実現する27。
次世代エッジコンピューティング:Jetson Thor
フィジカルAIの「脳」となるのは、データセンターのクラウドではなく、ロボットの体内に搭載されたエッジAIコンピュータである。NVIDIA Jetson Thorのような次世代プラットフォームは、数千TOPSの推論性能を提供し、ミリ秒単位の遅延が許されない物理世界での複雑な意思決定を支える4。このエッジコンピューティングの進化により、ロボットは通信環境に依存せず、真の自律性を獲得する1。
| 開発レイヤー | 従来のアプローチ | フィジカルAI / Co-Design | 鍵となる技術 |
| アルゴリズム | 静的なコード・命令 | 動的な学習・推論 | VLAモデル、強化学習 |
| コンピューティング | 汎用CPU/PLC | AI特化型エッジSoC | NVIDIA Jetson Thor |
| 物理設計 | 物理試作(プロトタイプ) | デジタルツイン上での検証 | OpenUSD, Cloud CAD |
| データ管理 | 現場での手動収集 | 合成データ生成 (SDG) | Omniverse Replicator |
| セキュリティ | 物理的な隔離(柵) | AIによる動的衝突回避 | リアルタイム・エッジ推論 |
1
日本企業の優位性とグローバル・サプライチェーンにおける戦略的地位
フィジカルAIの台頭は日本にとって脅威であると同時に、これ以上ない好機でもある。日本のセンサー、アクチュエータ、メカトロニクスの技術は、世界中のフィジカルAIが「身体」として必要とする最高品質のコンポーネントである4。
センサー・コンポーネントの「SimReady」化戦略
ソニー(イメージセンサー)、キーエンス(安全センサー)、村田製作所やTDK(IMU/慣性センサー)といった日本企業は、フィジカルAIの五感を支える極めて高い市場シェアと信頼性を持っている4。これらの企業が、自社センサーの物理的特性やノイズモデルを正確に再現したデジタル資産をOmniverseエコシステムに提供することで、世界中のロボット開発者は「日本製のセンサーを使わなければ、シミュレーションと現実が一致しない」という状況に置かれる4。
メカトロニクスの「脳」としてのNVIDIAプラットフォーム
ファナック、安川電機、川崎重工業といった世界屈指のロボットメーカーは、既にNVIDIAのプラットフォームとの統合を加速させている。例えばファナックは、Isaac Simを自社のロボットシミュレーションソフト「ROBOGUIDE」と統合し、仮想空間での学習から実機へのデプロイまでを完全にシームレス化している4。日本のハードウェアが持つ「高い精度と耐久性」という身体に、NVIDIAが提供する「高度な知能」という脳を組み合わせることで、競合する中国や米国の新興ロボット企業に対して圧倒的な差別化を実現できる4。
導入におけるリスク管理:安全、セキュリティ、そしてデータの主権
フィジカルAIの導入には、デジタル環境特有のリスクと、物理的な実体がもたらす安全上の課題が併存する。これらへの適切な対処は、経営陣が主導すべき重要なガバナンス項目である2。
安全性の保証と説明責任
AIが自律的に行動を決定する際、その判断プロセスがブラックボックス化することは許されない。特に人間と同じ空間で稼働するロボットにおいて、AIの「幻覚(Hallucination)」が物理的な事故に繋がれば、企業の存続を揺るがす事態となる2。Isaac Simのような環境において、数百万通りの極限状況(コーナーケース)をテストし、安全性が確率的に証明されたポリシーのみを実機に適用するという「安全性ファースト」のデプロイ戦略が求められる1。
現場の知恵とデータ主権(Sovereignty)の保護
フィジカルAIの学習には、工場の稼働データや熟練工のノウハウが含まれる。これらの「現場の知」を安易に米国のメガテック企業が管理するパブリッククラウドに送り続けることは、長期的には日本の製造業の付加価値を学習データとして吸い取られるリスクを孕んでいる21。どのデータを社内に秘匿し、どのデータを学習のために外部プラットフォームと共有するかという「データ主権」の戦略的設計は、競争力の源泉を守るために不可欠である3。
結論:日本企業が取るべき三つのアクション
フィジカルAIとNVIDIA Omniverseがもたらす変革は、単なるツールの導入ではなく、ものづくりの哲学そのもののアップデートである。日本企業が再びグローバルな製造業の覇権を握るために、以下の三つのアクションを提言する。
第一に、経営直轄の「デジタルツイン・タスクフォース」を設置し、シミュレーション・ファーストの開発文化を組織全体に浸透させることである。これは一部の設計部門の課題ではなく、設備投資のROIを劇的に改善し、労働力不足という構造的制約を突破するための全社的な経営戦略である19。
第二に、自社の製品(部品、ロボット、センサー)をOpenUSD形式の「SimReady」アセットとして早期に公開・提供し、グローバルなフィジカルAIのエコシステムにおけるデファクトスタンダードを狙うことである。デジタル空間でのプレゼンスを確立することは、実世界での販売力に直結する時代となっている4。
第三に、従来の「自動化」という静的な目標から、環境に適応し自己進化する「自律化」へとゴールを再設定することである。フィジカルAIを単なる効率化の手段ではなく、現場の暗黙知を永続的な資産に変え、新たな付加価値を生み出し続ける「知能化された工場」への転換を目指すべきである4。
NVIDIA Omniverseという強力な物理シミュレーション基盤を手に入れた今、日本の製造業が「電子工作」の時代を脱し、世界をリードする「自律型産業」へと進化するための準備は整っている。この特異点において、先んじて投資を行い、組織のOSを書き換えた企業のみが、50兆ドル規模のフィジカルAI市場という新大陸に到達できる4。
引用文献
- Top physical AI trends | Keylabs, 5月 15, 2026にアクセス、 https://keylabs.ai/blog/top-physical-ai-trends/
- Physical AI and humanoid robots | Deloitte Insights, 5月 15, 2026にアクセス、 https://www.deloitte.com/us/en/insights/topics/technology-management/tech-trends/2026/physical-ai-humanoid-robots.html
- Physical AI: Intelligence in motion | Strategy& – Strategyand.pwc.com, 5月 15, 2026にアクセス、 https://www.strategyand.pwc.com/de/en/industries/telecommunication-media-and-technology/physical-ai.html
- NVIDIAのフィジカルAI 50兆ドル市場。ファナック、安川電機 …, 5月 15, 2026にアクセス、 https://blogs.itmedia.co.jp/serial/2025/12/nvidiaai_50.html
- フィジカルAIは本当に成長戦略か?米メディアが暴いた人手不足日本における実装の必然, 5月 15, 2026にアクセス、 https://www.sbbit.jp/article/st/184204
- Physical AI – CSET, 5月 15, 2026にアクセス、 https://cset.georgetown.edu/wp-content/uploads/CSET-Physical-AI.pdf
- Sim-to-Real Reinforcement Learning for Vision-Based Dexterous Manipulation on Humanoids – arXiv, 5月 15, 2026にアクセス、 https://arxiv.org/html/2502.20396v1
- Reinforcement Learning for Robots — Getting Started With Isaac Lab, 5月 15, 2026にアクセス、 https://docs.nvidia.com/learning/physical-ai/getting-started-with-isaac-lab/latest/train-your-first-robot-with-isaac-lab/01-what-is-reinforcement-learning.html
- Global Physical AI Market Forecast to 2032: Trends, Growth Drivers & Industry Insights, 5月 15, 2026にアクセス、 https://www.marketsandmarkets.com/ResearchInsight/physical-ai-market-outlook.asp
- Embodied Intelligence: The Rise of Physical AI – Citi, 5月 15, 2026にアクセス、 https://www.citigroup.com/global/insights/embodied-intelligence-the-rise-of-physical-ai
- Isaac Sim – Robotics Simulation and Synthetic Data Generation – NVIDIA Developer, 5月 15, 2026にアクセス、 https://developer.nvidia.com/isaac/sim
- How RoboDK Bridges NVIDIA Isaac Sim 5.0 with the Real Factory Floor, 5月 15, 2026にアクセス、 https://robodk.com/blog/robodk-bridges-nvidia-isaacsim-real-factory-floor/
- Isaac Sim – Robotics Simulation and Synthetic Data Generation – NVIDIA Developer, 5月 15, 2026にアクセス、 https://developer.nvidia.com/isaac/sim?ncid=so-link-153566?ncid
- Volkswagen | NVIDIA Customer Stories, 5月 15, 2026にアクセス、 https://www.nvidia.com/en-us/case-studies/volkswagen-with-wandelbots-nova-and-isaac-sim/
- ロボット新技術:オープンプラットフォームとフィジカルAI – 新商品 …, 5月 15, 2026にアクセス、 https://www.fanuc.co.jp/ja/product/new_product/2025/202512_robot_physicalai.html
- From Imagination to Simulation: A Complete Guide to Importing World Labs Marble Models into NVIDIA Isaac Sim | by Geedhpruthvi | Medium, 5月 15, 2026にアクセス、 https://medium.com/@geedhpruthvi/from-imagination-to-simulation-a-complete-guide-to-importing-world-labs-marble-models-into-nvidia-69dde0ed5d6e
- 1 Simulation Metric That Cuts Factory AI Costs By 40% (Without Breaking Your Budget) | Creedtec.Online | by Daniel Ikechukwu – Medium, 5月 15, 2026にアクセス、 https://medium.com/@creed_1732/1-simulation-metric-that-cuts-factory-ai-costs-by-40-without-breaking-your-budget-creedtec-onli-84835abfee8e
- ABB Robotics and Nvidia aim to scale industrial physical AI with latest partnership, 5月 15, 2026にアクセス、 https://www.manufacturingdive.com/news/abb-robotics-nvidia-simulation-scale-industrial-physical-ai/814415/
- NVIDIA Omniverse for Warehouse Delivery Operations Simulation & Testing – Oxmaint, 5月 15, 2026にアクセス、 https://oxmaint.com/industries/delivery-operations-management/nvidia-omniverse-warehouse-delivery-operations-simulation
- ABB Robotics Taps NVIDIA Omniverse to Deliver Industrial‑Grade Physical AI at Scale, 5月 15, 2026にアクセス、 https://blogs.nvidia.com/blog/abb-robotics-omniverse/
- 「日本のモノづくりの英知」が5万円以下のAIに奪われている…「熟練職人の神技」を100年受け継ぐ唯一の方法 – プレジデントオンライン, 5月 15, 2026にアクセス、 https://president.jp/articles/-/111534?page=1
- なぜ日本の製造現場がPhysical AI時代に再評価されるのか? – note, 5月 15, 2026にアクセス、 https://note.com/tabsco/n/n1ec155e2c809
- Chapter 12: Real Case Studies in Industry 5.0: The Example of Nvidia – Emerald Publishing, 5月 15, 2026にアクセス、 https://www.emerald.com/books/edited-volume/16976/chapter/93970877/Real-Case-Studies-in-Industry-5-0-The-Example-of
- Welcome to Isaac Lab!, 5月 15, 2026にアクセス、 https://isaac-sim.github.io/IsaacLab/
- AI+HW 2035: Shaping the Next Decade – arXiv, 5月 15, 2026にアクセス、 https://arxiv.org/html/2603.05225v1
- AI+HW 2035: The 10-Year Roadmap for Co-Designing AI and Hardware, 5月 15, 2026にアクセス、 https://co-r-e.com/method/ai-hw-2035-codesign-roadmap
- Streamlining Robotics Development with Onshape and NVIDIA …, 5月 15, 2026にアクセス、 https://www.onshape.com/en/blog/robotics-development-cloud-native-cad-simulation-ptc-onshape-nvidia-isaac-sim
- 5 Costly Truths NVIDIA’s RoboLab Robotics Simulation Benchmark Reveals For Factories In 2026 | Creedtec.Online | by Daniel Ikechukwu – Medium, 5月 15, 2026にアクセス、 https://medium.com/@creed_1732/5-costly-truths-nvidias-robolab-robotics-simulation-benchmark-reveals-for-factories-in-2026-957338147ed2
- フィジカルAIが来ても日本の製造業が動かない本当の理由 | 現場と経営の断絶を解く。中小製造業のDX部長が書き続けるブログ – 生産性と社員のモチベーションが上がる工場の作り方, 5月 15, 2026にアクセス、 https://webmanagement.biz/8189